
腾讯正式发布四足机器人 Max 二代版本
8 月 8 日,腾讯正式发布 Max 二代机器人(以下简称 Max)。据介绍,Max 能够在梅花桩上完成旋转踏步、单桩跳跃、双轮站立等高难度动作。同时,过桩速度达到“前辈”Jamoca 的 4 倍。

据了解,Max 是由腾讯 Robotics X 实验室自研的多模态四足机器人,采用原创的腿轮一体的本体设计,实现了“崎岖路面走得稳,平坦路面跑得快”。相比一代,Max 在视觉感知、轨迹规划、运动控制等方面实现技术创新。同时,Max 原创性地融合了机器人腿式与轮式运动模态,从硬件上的机械和电路设计,到软件上的系统框架和控制算法创新,使得 Max 在崎岖路面走得稳,在平坦路面跑得快,更契合人类社会的现实环境。
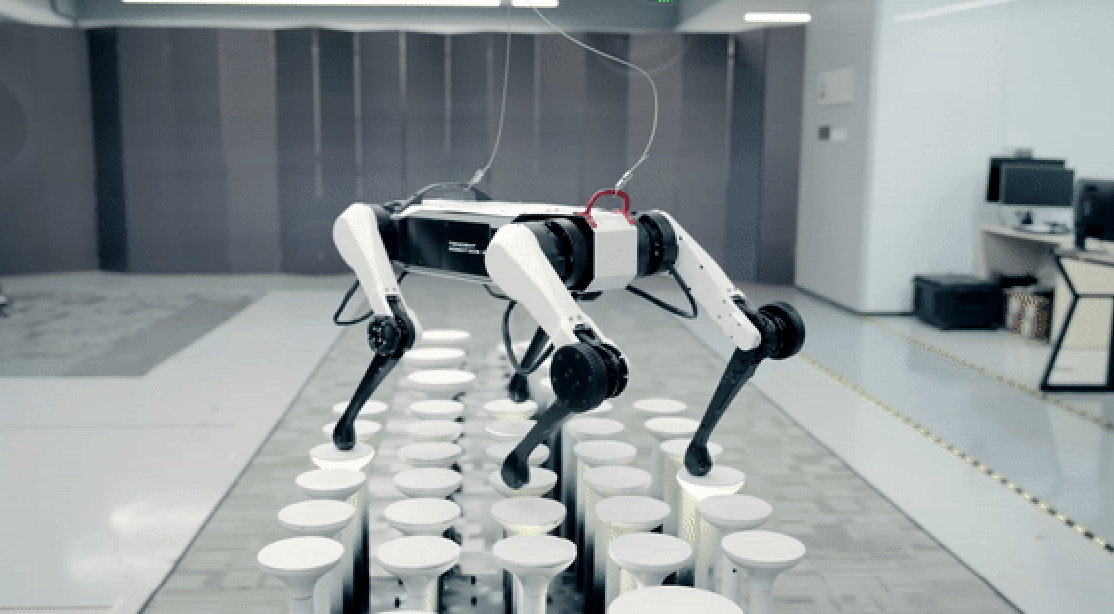
依托于机器人视觉定位、地形识别、全向六自由度运动规划、高精度模型预测控制等技术,Max 能够对复杂地形进行精确识别,并且根据地形实时想好步子,避免踩歪、打滑、摔倒等风险。通过梅花桩复杂地形场景,以及精确落点跳跃等条件设置,成功验证了 Max 对复杂地形的适应能力。
在腾讯 Robotics X 实验室为 Max 设置的测试场景中,Max 需要快速通过一个阵列全长 10 米,高 0.8 米(约为 Max 身高 2 倍)高低起伏的梅花桩阵列。想要顺利通过这一复杂地形,Max 面对的挑战重重。首先,Max 需要实时地形识别、建图,以应对密集细杆梅花桩这种复杂并带有轻微晃动的地形。看准地形后,Max 需要根据地形规划适合的运动轨迹,自动调整俯仰、侧身与转向,从而适应高低起伏的地形。

从结果来看,Max 在持续高频的冲击条件下,定位精度累计误差小于 1%,地形识别精度小于 2cm。
为更好保障 Max 力控精准度,腾讯 Robotics X 实验室在机器人移动能力和机身本体设计上都做了改良。Max 具备触地检测能力,可准确判断足端触地状态,进行质心轨迹规划与柔顺力控,避免身体的大幅度振荡以及足端触地后的反弹,确保落地平稳与运动流畅。
同时,Max 的机身本体在 2021 年版本基础上,完成了结构和电气系统的大量优化,能够应对跑、跳、翻等高动态动作产生的持续强力冲击,保证了本体的稳定性和可靠性。

除移动表现的进步之外,Max 在运动效率方面也有显著提升。Max 在完成跳跃、空翻等高难度动作时,可规划出最省力的运动轨迹,即如何让所需的驱动力最小化。
具体来讲,Max 可以根据目标跳跃距离、跳跃高度以及关节力矩限制等条件,计算出最优的跳跃轨迹,兼容四脚跳(Pronking)和双脚跳(Bounding)等步态。
自研模型算法,深度强化学习
据悉,腾讯 Robotics X 实验室于 2018 年成立,目前实验室研究方向包括作为机器人基础技术的感知能力,以及灵敏运动、灵巧操控、智能体三大支柱技术,致力于智能协作机器人。
为更好完成跳跃、空翻等高动态动作所带来的对机器人控制精度的挑战,团队结合离线最优跳跃轨迹规划及实时平衡运动轨迹规划,自研了模型预测控制算法(Chi et al., A Linearization of Centroidal Dynamics for the Model-Predictive Control of Quadruped Robots, ICRA 2022)。
与此同时,腾讯 Robotics X 实验室也利用深度强化学习等 AI 技术,推进机器人智能研究,让机器人在虚拟环境中自主学习,更好地适应复杂环境的变化。
不同于预先设计好规则之后做重复任务的工业机器人,腾讯 RoboticsX 实验室更关注机器人的自主特性研究,目的就是要在有很大不确定性的动态环境里,能够实现机器人的自主判断、自主决策,并自主完成任务。
据实验室研究人员介绍,基于深度强化学习与 sim2real 等技术,Max 用几个小时就能初步学会自然灵动的步态。作为腾讯 Robotics X 实验室自研的多模态四足机器人移动技术平台,Max 的相关新技术与算法同时具备良好的迁移性,为实验室研发其他类型的移动机器人、适配潜在应用场景沉淀技术与经验。
未来,腾讯 Robotics X 实验室还将在机器人行业做全方位、多领域的探索,向人机共存、共创、共赢的未来不断迈进。

腾讯云云原生提质增效实践精选集 2024
《2024腾讯云云原生提质增效实践精选集》出炉,5大热门技术领域,13个行业精选标杆案例,痛点到解决方案全...













评论