
看新闻很累?看技术新闻更累?试试下载 InfoQ 手机客户端,每天上下班路上听新闻,有趣还有料!
研究人员创建出了一种算法,允许自动驾驶车辆对其周围车辆的变道情况进行预测。
这套系统采用了长短期记忆(Long Short-Term Memories,LSTMs)这种深度学习的技术。通过采用该技术,经过训练的神经网络会观察一段时间内周围的情况,并且传递获得的信息来预测将会发生的事。尽管这项技术在面对长的输入序列或者预测更长时间跨度的数据时很不稳定,但是在预测有限时间内的情况时,这种方法非常有效。
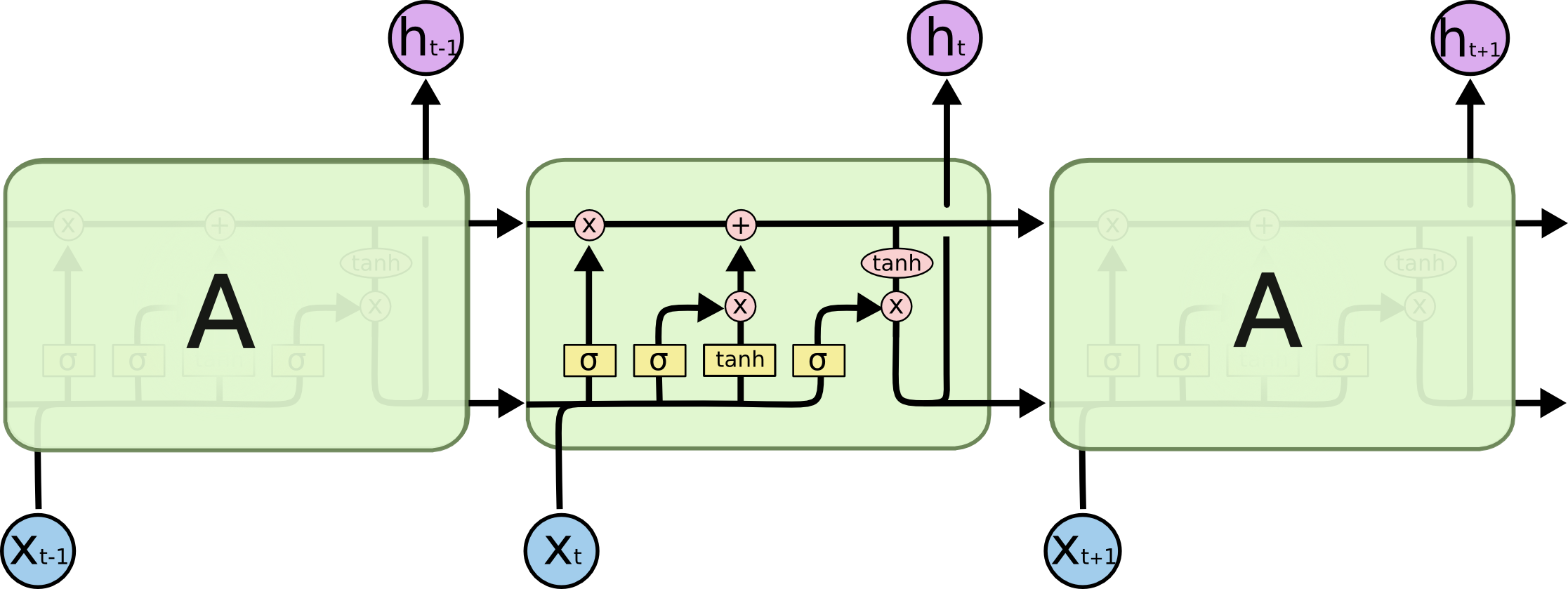
上图是对LSTM 模型的描述。模型会将信息“写”到其状态C,并随着时间的推移,将该状态向下传递。模型也会给出输出h,该输出h 会被用于下一个时帧。
LSTM 神经网络的输入是由离车辆最近的六辆车到该车的相对位置以及速度组成。神经网络会收到有关状态的信息,观测其他车辆在过去 3 秒内的行为。然后,神经网络会预测特定的车辆是否会向左移动一个车道、向右移动一个车道或是会保持在同一车道上。LSTM 的输出不但包括 LSTM 的状态,还包括 LSTM 的预测输出。该输出会被传送给具有两个密集层的神经网络,在三种可能性中选出一个作为该次预测的最终结果。
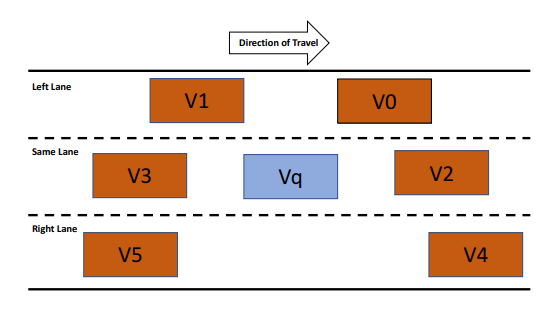
因为用了周围最近6 辆汽车的位置状态,网络也必须决定其他车辆是否要留在原有的车道上,或者是移动到另一个车道上。
研究人员改变了神经网络在一到五秒内获得的数据量,并使其可以预测未来长达3 秒内将会发生的事情。在车辆125 米的范围内,监测周围不同车辆的位置和方向,并以每秒25 次的频率采集测量值。
本文的作者写这篇文章旨在提出一种能够在传感器暂停工作时,预测其他车辆行为的一种方式:在激光雷达失灵的时候仍然知道其他车辆在哪里。他们用丰田内部数据集,对其算法进行了50 万次变道的训练和测试。尽管在高速公路上最有可能出现的情况是每辆车都留在其原有的车道上,但他们的算法能够在基准预测的基础上略有改进。
本文的原作者们将他们的文章发表在了arXiv 上了。
原文链接: Autonomous Vehicles Became Better at Predicting Lane-Changes
感谢薛命灯对本文的审校。
给InfoQ 中文站投稿或者参与内容翻译工作,请邮件至 editors@cn.infoq.com 。也欢迎大家通过新浪微博( @InfoQ , @丁晓昀),微信(微信号: InfoQChina )关注我们。
活动推荐:
2023年9月3-5日,「QCon全球软件开发大会·北京站」 将在北京•富力万丽酒店举办。此次大会以「启航·AIGC软件工程变革」为主题,策划了大前端融合提效、大模型应用落地、面向 AI 的存储、AIGC 浪潮下的研发效能提升、LLMOps、异构算力、微服务架构治理、业务安全技术、构建未来软件的编程语言、FinOps 等近30个精彩专题。咨询购票可联系票务经理 18514549229(微信同手机号)。
腾讯大规模云原生技术实践案例集
本案例集详细阐释了 QQ、腾讯会议、和平精英、小红书、斗鱼、微盟等十多个亿级用户产品背后的大规模云原生...













评论